ch8: 裝置驅動程式的基本知識
小弟不是電類的,若以下筆記有錯誤歡迎任何指教,謝謝。
環境
ubuntuDistributor ID: Ubuntu
Description: Ubuntu 16.04.1 LTS
Release: 16.04
Codename: xenial
kernel version:4.9.0-999-generic
- 可動態載入模組
- 裝置驅動程式架構
- 裝置驅動程式範例
- 建構與安裝驅動程式模組
- 載入模組
- 模組參數
- insmod
- lsmod
- modprobe
- depmod
- rmmod
- modinfo
- 驅動程式的檔案系統操作函式
- 裝置節點與mknod
- 整合為一體
驅動裝置的基本概念
裝置驅動程式是為了隱藏硬體的複雜性和多變性,幫助使用者能夠簡單的呼叫函式即能完成複雜的工作,並和使用者的程式隔離,並免直接存取核心資料結構駭硬體裝置。
在本章裝置驅動程式(device driver)、可動態載入模組(loadable module)、可動態載入核心模組(loadable kernel device,LKM)、模組(module),通通都是指核心裝置驅動模組(kernel device driver module),因為好像沒有統一的術語。
可動態載入模組
linux提供界面方便使用者在開機後動態的移除或加入模組到核心中,當核心完成啟動後,開始安裝動態組(loadable module),或是透過script安裝模組,當模組需要使用時,才要求載入模組,那麼動態載入模組有什麼好處呢?
- 可以任意將組插入或移除正在運行的裝置
- 可以直接更新模組,不須重新啟動
- 嵌入式裝置的容量有限,可以將模組放在其他除存裝置中
當然我們也可以透過重新編譯核心將驅動裝置直接編譯進核心,或是透過Chapter 6 : User Space Initialization將需要的模組和載入模組的script放進Initial RAM Disk這樣就可以直接在開機時啟動模組。
裝置驅動程式架構
簡略分為兩類 |裝置|字元裝置(character devices)|區塊裝置(block devices)| |:-------|:-------------------------|:--------------------| |讀寫方式|serial|以block為單位,進行讀寫| |舉例|keyboard,arduino|硬碟,隨身碟|
裝置驅動程式範例
project tree:
hello.c
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
static int __init hello_init(void) //初始化
{
printk(KERN_INFO "Hello world!");
return 0;
}
static void __exit hello_exit(void) //還原初始化
{
printk(KERN_INFO "bye bye world");
}
module_init(hello_init);
module_exit(hello_exit);
MODULE_AUTHOR("splasky");
MODULE_DESCRIPTION("Hello world example!");
MODULE_LICENSE("GPL");
接下來我們要將寫好的模組加入到kernel中,步驟如下
- 下載linux kernel source code
wget wget https://cdn.kernel.org/pub/linux/kernel/v4.x/linux-4.8.13.tar.xz
tar Jxvf linux-4.8.13
cd linux 4.8.13
- 進入.../driver/char 並建立hello directory,這個資料夾就是我們等等要將我們寫的模組source code放置的位置
cd drivers/char
mkdir hello
cp hello.c .../drivers/char/hello
- 在hello中新增編譯hello模組的makefile
splasky@splasky-XPS13→ [~/workspace/linux-4.8.13] $ cat drivers/char/hello/Makefile
obj-$(CONFIG_HELLO) +=hello.o
- 在核心組態設定檔中加入選單表示hello模組,可以指定是否內建或是可動態載入核心模組
splasky@splasky-XPS13→ [~/workspace/linux-4.8.13] $ cat drivers/char/Kconfig |head -n 20
#
# Character device configuration
#
menu "Character devices"
source "drivers/tty/Kconfig"
config HELLO
tristate "Enable Hello"
default m
help
Example Hello module
修改完後就可以在menuconfig看見核心組態檔(Kconfig)的編譯選項 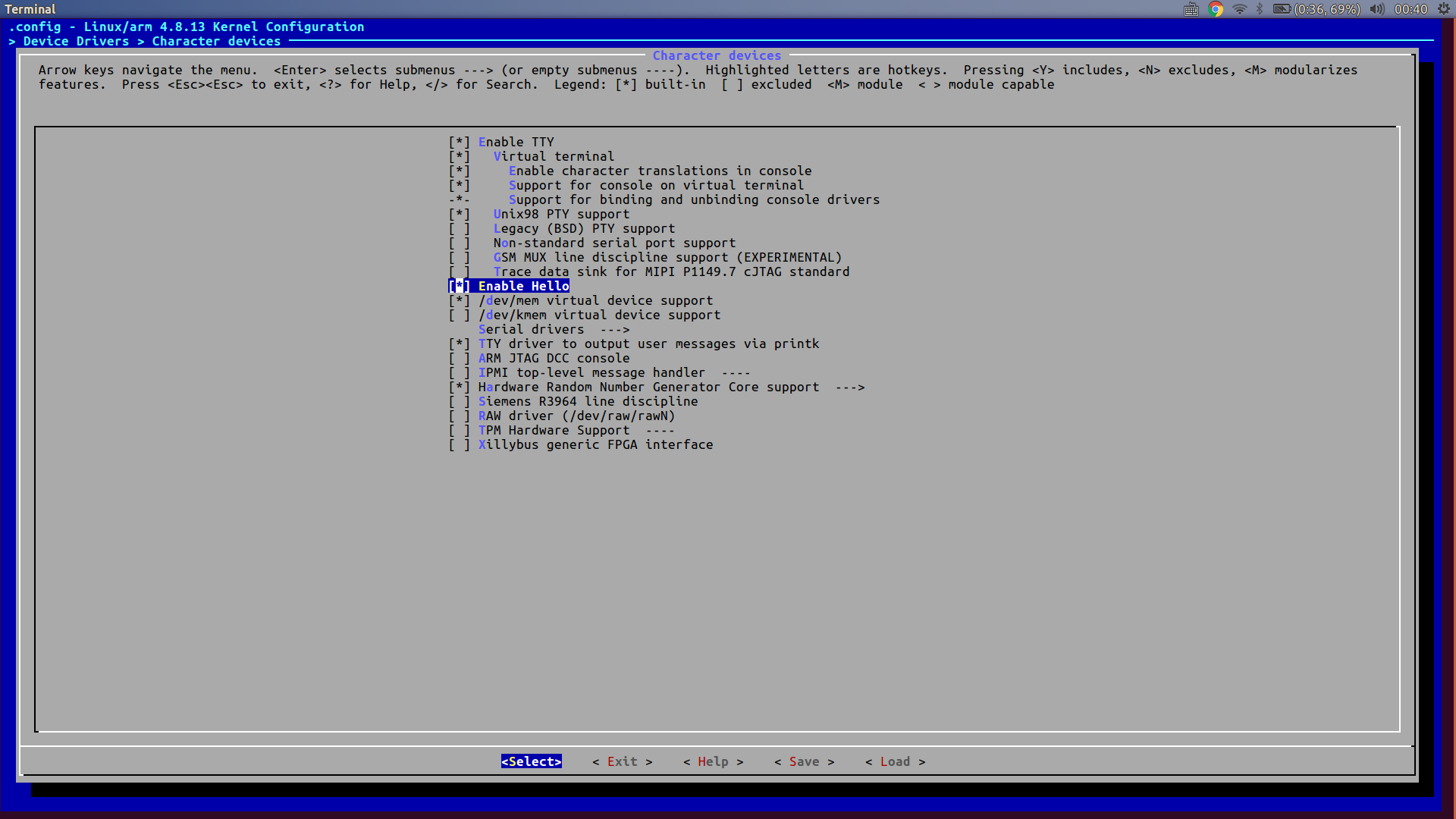
- 修改.../drivers/char/Makefile,決定建構時要不要包含此目錄
splasky@splasky-XPS13→ [~/workspace/linux-4.8.13] $ cat drivers/char/Makefile
#
# Makefile for the kernel character device drivers.
#
obj-y += mem.o random.o
...
obj-$(CONFIG_HELLO) += hello/
到這邊修改完後我們就可以開始建構驅動程式模組了!
建構與安裝驅動程式模組
splasky@splasky-XPS13→ [~/workspace/linux-4.8.13] $ make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- defconfig
*** Default configuration is based on 'multi_v7_defconfig'
#
# configuration written to .config
#
splasky@splasky-XPS13→ [~/workspace/linux-4.8.13] $ make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- modules
...compiling...
splasky@splasky-XPS13→ [~/workspace/linux-4.8.13] $ ls drivers/char/hello/
hello.c hello.ko hello.mod.c hello.mod.o hello.o Makefile modules.order Module.symvers
hello.ko模組就是我們的模組
不知道有沒有其他方法可以直接上傳模組到qemu虛擬機裡,或是直接透過qemu掛載模組,小弟這邊是透過NFS掛載於qemu,想知道一般大家都是怎麼做的? 如何掛載NFS可以參考這裡
載入模組
接下來我們嘗試在qemu上掛載我們編譯好的hello.ko
首先先更改console的級別才能將log的訊息列印到console上
$ cat /proc/sys/kernel/printk
4 4 1 7
$ cat /proc/sys/kernel/printk
7 4 1 7
更詳習的規則可以參考這裡
接著掛載module
$ cp mnt/hello.ko /lib/modules/4.8.13/kernel/
$ depmod
$ modprobe hello
Hello world!$
就可以發現init的message列印於當前console下 移除已掛載的module也很簡單
modprobe -r hello
模組參數
現在讓我們為模組增加參數,讓其可以透過insmod輸入模組參數
splasky@school->[~/workspace/module] (master) 166h10m $ cat src/hello2.c
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
static int debug_enable = 0; //宣告靜態變數debug_enable
module_param(debug_enable, int, 0);
MODULE_PARM_DESC(debug_enable, "Enable module debug mode.");
static int __init hello_init(void)
{
printk(KERN_INFO "debug mode is %s\n", debug_enable ? "enable" : "disable");
return 0;
}
static void __exit hello_exit(void)
{
printk(KERN_INFO "bye bye world\n");
}
module_init(hello_init);
module_exit(hello_exit);
MODULE_AUTHOR("splasky");
MODULE_DESCRIPTION("Hello world example!");
MODULE_LICENSE("GPL");
module_param定義於.../include/linux/moduleparam.h中,由modules.h引入,作用是將模組參數向核心模組子系統做註冊 MODULE_PARM_DESC向核心註冊參數說明的字串 接著讓我們看看如何在載入模組時使用引數
splasky@school->[~/workspace/module] (master) 166h26m $ sudo insmod src/hello2.ko debug_enable=1
splasky@school->[~/workspace/module] (master) 166h27m $ dmesg |tail -n 2
[451967.837106] bye bye world
[451972.059004] debug mode is enable
也可以直接引入
splasky@school->[~/workspace/module] (master) 166h28m $ sudo insmod src/hello2.ko
splasky@school->[~/workspace/module] (master) 166h28m $ dmesg |tail -n 2
[452079.503340] bye bye world
[452085.328312] debug mode is disable
模組工具
模組工具在前一小節已經介紹過,如果你想要更詳細的說明請參考manual
insmod
insmod 接收一個模組的==絕對路徑==,並將模組載入核心
sudo insmod src/hello2.ko
lsmod
將載入到核新的模組清單印出
splasky@school->[~/workspace/module] (master) 166h28m $ sudo lsmod
[sudo] password for splasky:
Module Size Used by
hello2 16384 0
cdc_acm 36864 0
btrfs 987136 0
ufs 73728 0
gf128mul 16384 1 lrw
...
最右邊的欄位Uesd by表示該模組正在使用中,並列出相依性
modprobe
modprobe可以幫我們解決模組間相依的問題,舉例來說上例的gf128mul需要lrw模組才能使用,modprobe能幫我解決這個問題,並以正確的順序載入。
modprobe gf128mul
會將lrw與gf128mul都載入
modprobe -r gf128mul
則會將兩個模組都移除 :::info 使用modeprobe載入module時要先將module複製至/lib/modules/$(uname -r)/kernel 下 :::
depmod
modprobe必須依賴modules.dep來知道模組間的相依關係,而depmod負責為我們產生這個檔案,這個檔案內含一份核心建構系統有啟用的模組清單。 這個檔案放至於/lib/modules/4.4.0-($uname -r)/modules.dep 下
cat /lib/modules/4.4.0-51-generic/modules.dep
格式為 [模組]:[關聯模組]
rmmod
移除核心中的模組,不需要路徑,不會移除相依的模組
rmmod hello2
modinfo
檢視module的詳細資訊
splasky@school->[~/workspace/module] (master) 167h38m $ modinfo hello2
filename: /lib/modules/4.4.0-51-generic/kernel/hello2.ko
license: GPL
description: Hello world example!
author: splasky
srcversion: CE729C455AA625EF69A6DDB
depends:
vermagic: 4.4.0-51-generic SMP mod_unload modversions
parm: debug_enable:Enable module debug mode. (int)
與驅動程式溝通
接下來我們將介紹如何由module提供介面函式給user space application
驅動程式的檔案系統操作函式
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/fs.h>
#define DEVICE_NAME "hello3"
static int debug_enable = 0;
module_param(debug_enable, int, 0);
MODULE_PARM_DESC(debug_enable, "Enable module debug mode.");
struct file_operations hello_fops;
static int hello_open(struct inode *inode, struct file *file)
{
printk("Hello open: successful\n");
return 0;
}
static int hello_release(struct inode *inode, struct file *file)
{
printk("Hello release: successful\n");
return 0;
}
static ssize_t hello_read(struct file *file, char *buf, size_t count, loff_t *ptr)
{
printk("Hello read: returning zero bytes\n");
return 0;
}
static ssize_t hello_write(struct file *file, const char *buf, size_t count, loff_t *ppos)
{
printk("Hello write: accepting zero bytes\n");
return 0;
}
static long hello_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{
printk("Hello ioctl:cmd=%ud, arg=%lu\n", cmd, arg);
return 0;
}
static int __init hello_init(void)
{
int ret=0;
printk(KERN_INFO "debug mode is %s\n", debug_enable ? "enable" : "disable");
ret = register_chrdev(234, DEVICE_NAME, &hello_fops);
if (ret < 0)
{
printk(KERN_ALERT"ERROR registering hello device\n");
goto hello_fail;
}
printk(KERN_INFO "Hello module registered successfully!\n");
/* init process here */
return 0;
hello_fail:
return ret;
}
static void __exit hello_exit(void)
{
printk(KERN_INFO "Hello exit\n");
}
/* 透過建立一個file operation 來和character裝製做connect */
struct file_operations hello_fops =
{
owner:
THIS_MODULE,
read:
hello_read,
write:
hello_write,
unlocked_ioctl:
hello_ioctl,
open:
hello_open,
release:
hello_release,
};
module_init(hello_init);
module_exit(hello_exit);
MODULE_AUTHOR("splasky");
MODULE_DESCRIPTION("Hello world example!");
MODULE_LICENSE("GPL");
裝置節點與mknod
裝置節點是一種特殊的檔案類型,linux用這種檔案來代表裝置,幾乎所有linux distribution都將裝置節點放在/dev下,我們會透過mknod產生裝置節點。
mknod /dev/hello3 c 234 0
mknod [裝置節點位置] [檔案類型] [主編號] [次編號] 我們透過裝置節點來跟已安裝的驅動程式做銜接,當程式透過open系統呼叫時,核心會透過主編號(此範例中為234)將驅動程式和裝置節點做連接,作業系統並不理會次編號,會把次編號直接傳給驅動裝置,讓一個驅動程式可以處理多個子裝置。 :::info 裝置節點一般是透過udev產生,後面章節會介紹到,另外本章的範例是透過手動直接把裝置主編號直接指定在source code中,這樣做並不好,應該透過kernel指定一個給驅動程式,詳細作法Linux Device Drivers的第三章有說明到。 :::
還要再研究
整合為一體
現在我們創立一個use-hello3.c 來運用我們寫的驅動程式
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
int main(int argc, char *argv[])
{
/* our file descriptor */
int fd=0,rc=0;
char *rd_buf[16];
printf("%s: entered\n",argv[0]);
/* open device */
fd = open("/dev/hello3",O_RDWR);
if(fd==-1){
perror("open failed");
rc=fd;
exit(-1);
}
printf("open successful!\n");
/* Issue a read */
rc=read(fd,rd_buf,0);
if(rc==-1){
perror("read failed");
close(fd);
exit(-1);
}
printf("read:returning %d bytes!\n",rc);
close(fd);
return 0;
}
最後執行我們的use-hello
splasky@splasky-XPS13→ [~/workspace/kernel_module/module] (master) 237h25m $ ls -l /dev/hello*
ls: cannot access '/dev/hello*': No such file or directory
splasky@splasky-XPS13→ [~/workspace/kernel_module/module] (master) 237h26m $ sudo mknod /dev/hello3 c 234 0
[sudo] password for splasky:
splasky@splasky-XPS13→ [~/workspace/kernel_module/module] (master) 237h26m $ sudo insmod src/hello3.ko
splasky@splasky-XPS13→ [~/workspace/kernel_module/module] (master) 237h27m $ sudo ./use-hello
./use-hello: entered
open successful!
read:returning 0 bytes!
splasky@splasky-XPS13→ [~/workspace/kernel_module/module] (master) 237h29m $ dmesg | tail -n 8
[ 193.437511] hello3: loading out-of-tree module taints kernel.
[ 193.437724] hello3: module verification failed: signature and/or required key missing - tainting kernel
[ 193.438665] debug mode is disable
[ 193.438678] Hello module registered successfully!
[ 204.570530] Hello open: successful
[ 204.570534] Hello read: returning zero bytes
[ 204.570537] Hello release: successful
[ 300.054926] mce: [Hardware Error]: Machine check events logged
GPL
https://www.gnu.org/licenses/quick-guide-gplv3.html
作者推薦的參考書目
Linux Device Drivers:臺灣:Linux 驅動程式, 3/e (Linux Device Drivers, 3/e) Essential Linux Device Drivers有中文版 Filesystem Hierarchy Standard
參考資料
Loda's blog The Linux Kernel Module Programming Guide 開機流程、模組管理與 Loader
本參考資料中也含有模組工具的使用