Convolutional Networks
deep dive into images and convolutional models
Convnet
BackGround
- 人眼在识别图像时,往往从局部到全局
- 局部与局部之间联系往往不太紧密
- 我们不需要神经网络中的每个结点都掌握全局的知识,因此可以从这里减少需要学习的参数数量
Weight share
- 但这样参数其实还是挺多的,所以有了另一种方法:权值共享
Share Parameters across space
-
取图片的一小块,在上面做神经网络分析,会得到一些预测
-
将切片做好的神经网络作用于图片的每个区域,得到一系列输出
-
可以增加切片个数提取更多特征
-
在这个过程中,梯度的计算跟之前是一样的
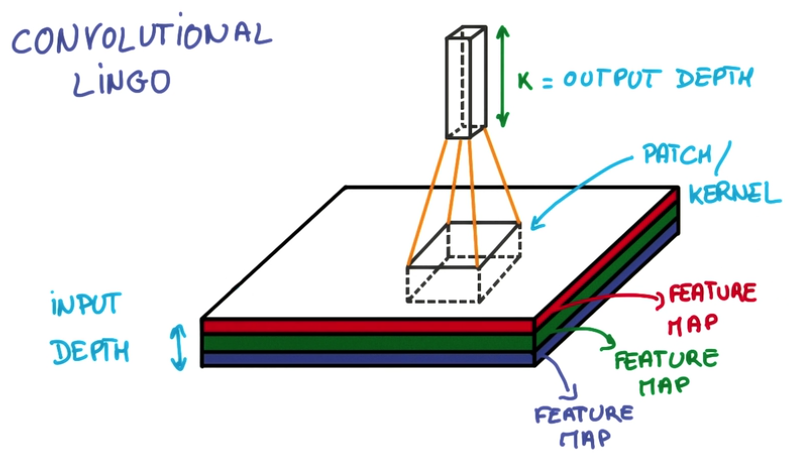
Concept
-
Patch/Kernel:一个局部切片
-
Depth: 数据的深度,图像数据是三维的,长宽和RGB,神经网络的预测输出也属于一维
-
Feature Map:每层Conv网络,因为它们将前一层的feature映射到后一层(Output map)
-
Stride: 移动切片的步长,影响取样的数量
-
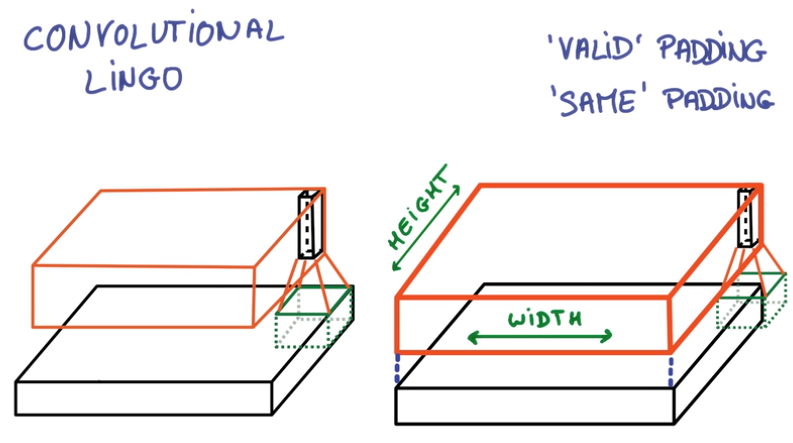
在边缘上的取样影响Conv层的面积,由于移动步长不一定能整除整张图的像素宽度,不越过边缘取样会得到Valid Padding, 越过边缘取样会得到Same Padding
-
Example
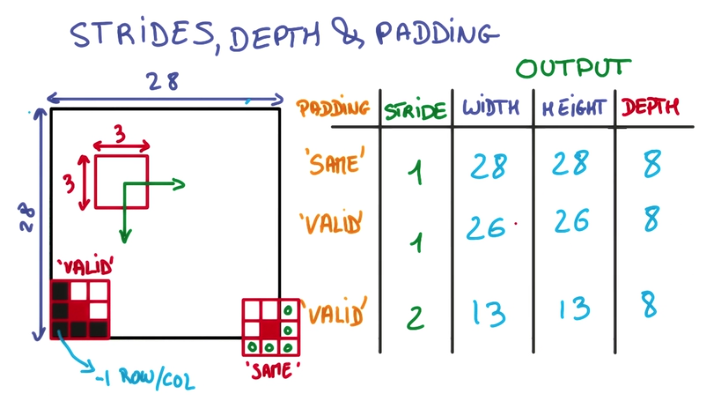
- 用一个3x3的网格在一个28x28的图像上做切片并移动
- 移动到边缘上的时候,如果不超出边缘,3x3的中心就到不了边界
- 因此得到的内容就会缺乏边界的一圈像素点,只能得到26x26的结果
- 而可以越过边界的情况下,就可以让3x3的中心到达边界的像素点
- 超出部分的矩阵补零就行
Deep Convnet
在Convnet上套Convnet,就可以一层一层综合局部得到的信息
OutPut
将一个deep and narrow的feature层作为输入,传给一个Regular神经网络 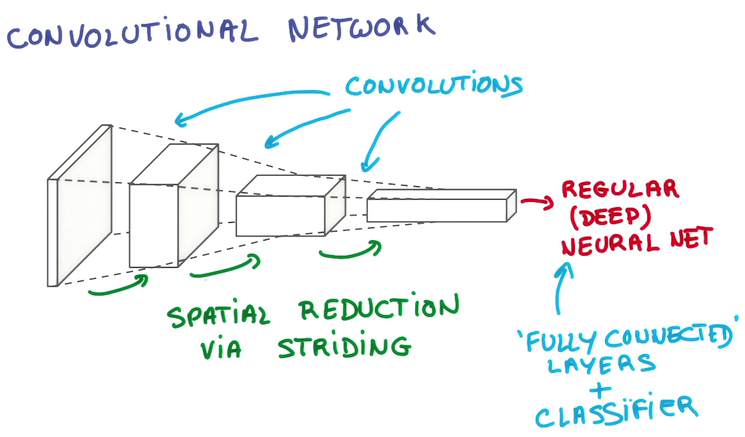
Optimization
Pooling
将不同Stride的卷积用某种方式合并起来,节省卷积层的空间复杂度。
- Max Pooling 在一个卷积层的输出层上取一个切片,取其中最大值代表这个切片
- 优点
- 不增加需要调整的参数
- 通常比其他方法准确
- 缺点:更多Hyper Parameter,包括要取最值的切片大小,以及去切片的步长
LENET-5, ALEXNET
- Average Pooling 在卷积层输出中,取切片,取平均值代表这个切片
1x1 Convolutions
在一个卷积层的输出层上,加一个1x1的卷积层,这样就形成了一个小型的神经网络。
- cheap for deeper model
- 结合Average Pooling食用效果更加
Inception
对同一个卷积层输出,执行各种二次计算,将各种结果堆叠到新输出的depth方向上 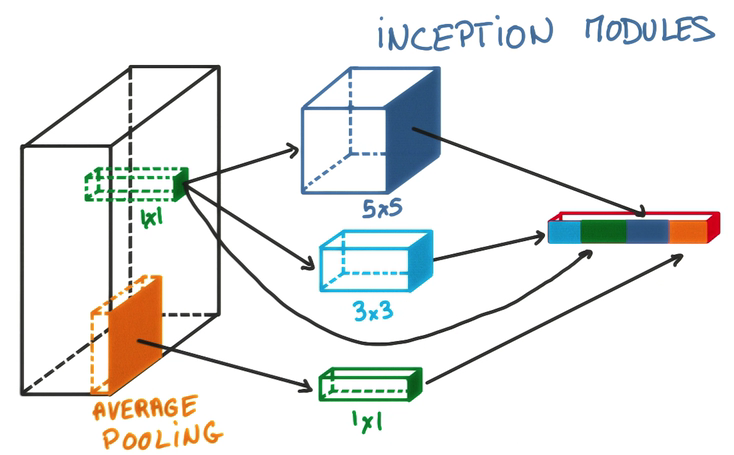
卷积神经网络实践
参考链接
- 张雨石 Conv神经网络
- Bill Xia 卷积神经网络(CNN)
书籍推荐