I2C protocol 原理及應用
I²C (Inter-Integrated Circuit) 是內部整合電路的稱呼,是一種串列通訊匯流排,使用多主從架構,由飛利浦公司在 1980 年代為了讓主機板、嵌入式系統或手機用以連接低速週邊裝置而發展。I²C 的正確讀法為 "I-squared-C" ,而 "I-two-C" 則是另一種錯誤但被廣泛使用的讀法,在大陸地區則多以 "I方C" 稱之。截至 2006 年 11 月 1 日為止,使用 I²C 協定不需要為其專利付費,但製造商仍然需要付費以獲得 I²C Slave (從屬裝置位址)。
I²C的參考設計使用一個7位元長度的位址空間但保留了16個位址,所以在一組匯流排最多可和112個節點通訊。常見的I²C匯流排依傳輸速率的不同而有不同的模式:標準模式(100 Kbit/s)、低速模式(10 Kbit/s),但時脈頻率可被允許下降至零,這代表可以暫停通訊。而新一代的I²C匯流排可以和更多的節點(支援10位元長度的位址空間)以更快的速率通訊:快速模式(400 Kbit/s)、高速模式(3.4 Mbit/s)。
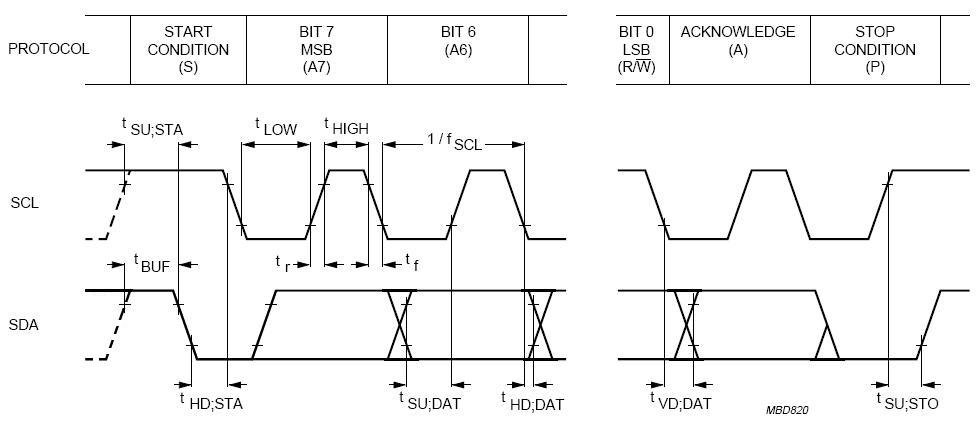
###I2C 的啟動條件及停止條件
-
I2C start condition 有二種情況,如上圖所示,虛線表示 read 動作時的第二次 start condition,實線表示 r/w 時的第一次 start condition。
-
I2C stop condition 只有一種情況,如上圖所示。
void i2c_start(void)
{
// for second start signal on i2c_read
I2C_SDA = HIGH;
I2C_SCL = HIGH;
i2c_wait();
// send start signal
I2C_SDA = LOW;
i2c_wait2();
I2C_SCL = LOW;
}
void i2c_stop(void)
{
i2c_wait2();
I2C_SDA = LOW;
i2c_wait2();
I2C_SCL = HIGH;
i2c_wait2();
I2C_SDA = HIGH;
}
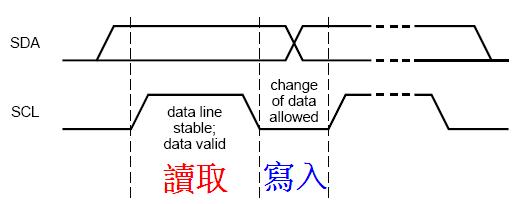
###I2C 的讀寫動作
- 當 SCL=HIGH 時,表示 SDA 穩定,可以做讀取動作。
- 當 SCL=LOW 時,表示 SDA 混亂,不可以讀取;因為此時可以設定 SDA 的值,也就是做寫入動作。
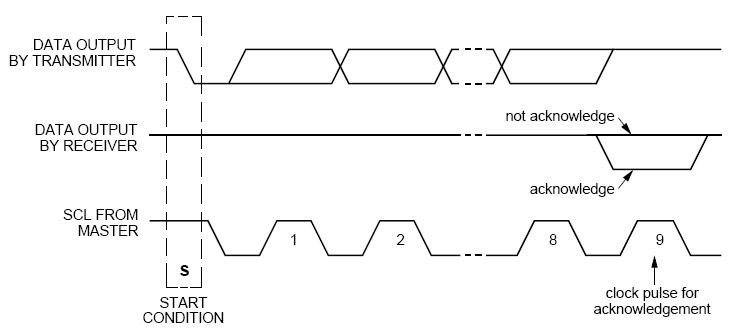
- master 每一次傳送八個 bit,最後 slave 會回傳一個 ack bit,表示接受是否完成。
- master 每一次接受八個 bit,最後 master 要傳送一個 ack bit,表示接受已經完成。
- 在傳送完第八個 bit 之後,再等待 slave 接受完成後,需將 SDA 設成 HIGH,此時 slave 會將 SDA 拉回 LOW,表示接受動作完成。如果 acknowledge=HIGH,也就是 slave 沒有拉成 LOW 則表示傳送失敗。
bit i2c_write(unsigned char value)
{
char i=9;
bit ack;
// upload data
while(--i)
{
i2c_wait2();
I2C_SDA = (value & 0x80) ? HIGH : LOW;
i2c_wait2();
// send data
I2C_SCL = HIGH;
i2c_wait();
value <<= 1;
I2C_SCL = LOW;
}
// get acknowledgement
i2c_wait2();
I2C_SDA = HIGH;
i2c_wait2();
I2C_SCL = HIGH;
i2c_wait2();
ack = I2C_SDA;
i2c_wait2();
I2C_SCL = LOW;
// return acknowledge
return ack;
}
unsigned char i2c_read(bit acknowledge)
{
char i=9;
unsigned char value=0;
// read data
while(--i)
{
value <<= 1;
i2c_wait();
I2C_SCL = HIGH;
i2c_wait2();
value |= I2C_SDA;
i2c_wait2();
I2C_SCL = LOW;
}
// send acknowledge
i2c_wait2();
I2C_SDA = acknowledge;
i2c_wait2();
I2C_SCL = HIGH;
i2c_wait();
I2C_SCL = LOW;
// return data
return value;
}
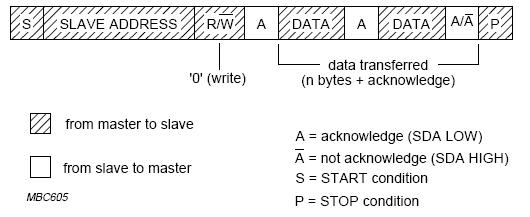
完整寫入流程
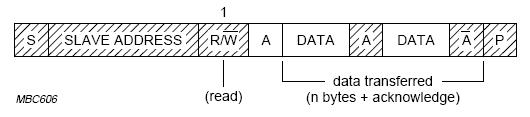
標準 I2C 讀寫流程 by Philips
-
讀取完最後一個 byte 時,記得要回傳 no acknowledge(SDA=HIGH),表示已經沒有要繼續讀取資料。
-
讀取完最後一個 byte 時,回傳 acknowledge(SDA=LOW),再傳送 stop signal,則會造成後續的讀寫動作失敗。(這是在讀取 PCF8593 的經驗)
完整讀取流程 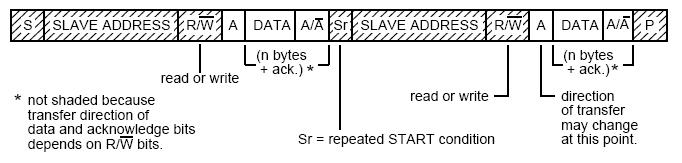
複合式讀寫流程
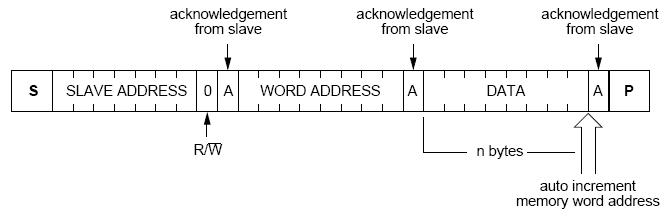
###常用 I2C NVRAM 讀寫流程 by Philips PCF8953
-
一般 RTC 都有帶一些 NVRAM 或是讀寫 EEPROM,需要先指定讀寫的 register address 才可以。所以在寫時,先寫入 slave address 後,需再寫入 register address,讓 chip 知道你要寫入的起始位址,接下來才能寫入 data。
-
由於讀取前也要先寫入 register address,所以一般 NVRAM 讀取動作都是使用標準複合式流程,也就是先寫入 register address,再下一次 start conditon,再做讀取動作。
void i2c_write_byte(unsigned char slave_addr, unsigned char reg_addr, unsigned char value)
{
char i=10;
EA = 0;
while (--i)
{
i2c_start();
if(i2c_write(slave_addr)) continue;
if(i2c_write(reg_addr)) continue;
if(i2c_write(value)) continue;
i2c_stop();
break;
}
EA = 1;
}
unsigned char i2c_read_byte(unsigned char slave_addr, unsigned char reg_addr)
{
char i=10;
unsigned char value=0;
EA = 0;
while (--i)
{
// send register address
i2c_start();
if(i2c_write(slave_addr&0xfe)) continue;
if(i2c_write(reg_addr)) continue;
// read data
i2c_start();
if(i2c_write(slave_addr | 1)) continue;
value = i2c_read(1);
i2c_stop();
break;
}
EA = 1;
return value;
}
- 完整程式碼
//=============================================================================
// Project:
// Module: i2c.c
// Copyright: Chilin Co. 2008
// Author: enos
// Date: Sep. 24, 2008
//=============================================================================
// Description: IIC driver
//
//=============================================================================
#include <8051.h>
#include <stdio.h>
/*****************************************************************************
* local definition
*****************************************************************************/
#define HIGH 1
#define LOW 0
#define I2C_SCL P1_6
#define I2C_SDA P1_7
/*****************************************************************************
* Author: enos
* Function: i2c_wait
* Description: wait for some time to get proper I2c timing
*****************************************************************************/
void i2c_wait(void)
{
_asm
nop nop nop nop nop
nop nop nop nop nop
_endasm;
}
/*****************************************************************************
* Author: enos
* Function: i2c_wait2
* Description: wait for some time to get proper I2c timing
*****************************************************************************/
void i2c_wait2(void)
{
_asm
nop nop nop nop nop
_endasm;
}
/*****************************************************************************
* Author: enos
* Function: i2c_start
* Description: I2C start signal.
* <comment>
* SCL ________
* \_________
* SDA _____
* \____________
*
* Return value: None
*****************************************************************************/
void i2c_start(void)
{
// for second start signal on i2c_read
I2C_SDA = HIGH;
I2C_SCL = HIGH;
i2c_wait();
// send start signal
I2C_SDA = LOW;
i2c_wait2();
I2C_SCL = LOW;
}
/*****************************************************************************
* Author: enos
* Function: i2c_stop
* Description: I2C stop signal.
* <comment>
* ____________
* SCL _______/
* _________
* SDA __________/
*
* assume I2C_SCL = LOW, I2C_SDA = LOW
*****************************************************************************/
void i2c_stop(void)
{
i2c_wait2();
I2C_SDA = LOW;
i2c_wait2();
I2C_SCL = HIGH;
i2c_wait2();
I2C_SDA = HIGH;
}
/*****************************************************************************
* Author: enos
* Function: i2c_write
* Description: I2C write command
* I2C_SCL = LOW data change
* I2C_SCL = HIGH data stable
*****************************************************************************/
bit i2c_write(unsigned char value)
{
char i=9;
bit ack;
while(--i)
{
// upload data
i2c_wait2();
I2C_SDA = (value & 0x80) ? HIGH : LOW;
i2c_wait2();
// send data
I2C_SCL = HIGH;
i2c_wait();
value <<= 1;
I2C_SCL = LOW;
}
// get acknowledgement
i2c_wait2();
I2C_SDA = HIGH;
i2c_wait2();
I2C_SCL = HIGH;
i2c_wait2();
ack = I2C_SDA;
i2c_wait2();
I2C_SCL = LOW;
return ack;
}
/*****************************************************************************
* Author: enos
* Function: i2c_read
* Description: I2C read command
* I2C_SCL = LOW data change
* I2C_SCL = HIGH data stable
*****************************************************************************/
unsigned char i2c_read(bit acknowledge)
{
unsigned char value=0;
char i=9;
// read data
while(--i)
{
// download data
value <<= 1;
i2c_wait();
// get data
I2C_SCL = HIGH;
i2c_wait2();
value |= I2C_SDA;
i2c_wait2();
I2C_SCL = LOW;
}
// send acknowledge
i2c_wait2();
I2C_SDA = acknowledge;
i2c_wait2();
I2C_SCL = HIGH;
i2c_wait();
I2C_SCL = LOW;
// return data
return value;
}
/*****************************************************************************
* Author: enos
* Function: i2c_write_byte
* Description: write one byte
*****************************************************************************/
void i2c_write_byte(unsigned char slave_addr, unsigned char reg_addr, unsigned char value)
{
char i=10;
EA = 0; // Disable All Interrupt
while (--i)
{
i2c_start(); // start I2C
if(i2c_write(slave_addr)) continue; // slave address
if(i2c_write(reg_addr)) continue; // register address
if(i2c_write(value)) continue; // send data
i2c_stop(); // stop I2C
break;
}
EA = 1; // Enable All Interrupt
}
/*****************************************************************************
* Author: enos
* Function: i2c_read_byte
* Description: read one byte
*****************************************************************************/
unsigned char i2c_read_byte(unsigned char slave_addr, unsigned char reg_addr)
{
char i=10;
unsigned char value=0;
EA = 0; // Disable All Interrupt
while (--i)
{
// send register address
i2c_start(); // start I2C
if(i2c_write(slave_addr&0xfe)) continue; // slave address
if(i2c_write(reg_addr)) continue; // register address
// read data
i2c_start(); // restart I2C
if(i2c_write(slave_addr | 1)) continue; // slave address
value = i2c_read(1); // read data
i2c_stop(); // stop I2C
break;
}
EA = 1; // Enable All Interrupt
return value;
}