A03: compute-pi
# A03: compute-pi
目標
- 學習透過離散微積分求圓周率
- 著手透過 SIMD 指令作效能最佳化
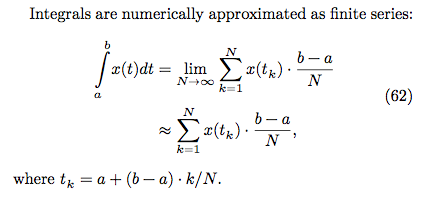
複習黎曼積分
如果你真的忘記微積分,趕快透過均一教育平臺學習「微積分概論」。
N 越大(切的越細),數值越精確。
baseline 版本
- 根據上述數學式轉換成 baseline.c
- 修改變數,將傳入的參數改為 N,比較直覺
- N 越大,dt 越小,切割越細
double computePi_v1(size_t N)
{
double pi = 0.0;
double dt = 1.0 / N; // dt = (b-a)/N, b = 1, a = 0
for (size_t i = 0; i < N; i++) {
double x = (double) i / N; // x = ti = a+(b-a)*i/N = i/N
pi += dt / (1.0 + x * x); // integrate 1/(1+x^2), i = 0....N
}
return pi * 4.0;
}
AVX SIMD 版本
AVX (Advanced Vector Extensions) 是 Intel 一套用來作 Single Instruction Multiple Data 的指令集
- 128 位 SIMD 暫存器 xmm0 - xmm15 擴展為 256 位的 ymm0 - ymm15 暫存器
- 支持 256 位的向量運算,由原來 128 位擴展為 256 位
- 指令可支持最多 4 個 operand,實現目標操作數無需損毀原來的內容
- 引進新的 AVX 指令,非 Legacy SSE 指令移植
- 新增 FMA 指令子集 (fused multiply-add/subtract 類運算)
- 可用
$ cat /proc/cpuinfo | grep flags尋找是否存在fma關鍵字 - 像是
Intel(R) Core(TM) i5-3317U CPU等級的電腦就沒支援,這樣的話可用模擬器
- 可用
- 引進新的指令編碼模式,使用 VEX prefix 來設計指令編碼
__m256d 並不是一種暫存器,是指可以用來載入到 AVX 暫存器的 "Data type"
後面程式中用到了__attribute__機制,可以用來設置函數屬性(Function Attribute)、變數屬性(Variable Attribute)和類型屬性(Type Attribute)。aligned 則規定變數或結構的最小對齊格式,以 Byte 為單位。
AVX SIMD + Unroll looping
source 為何 AVX SIMD 的版本沒辦法達到預期 4x 效能提昇呢?
因為浮點 scalar 除法和 vector 除法的延遲,導致沒辦法有效率的執行。考慮到填充 vector instruction 的 pipeline 未能充分使用,我們可以預先展開迴圈,以便使用更多的 scalar 暫存器,從而減少資料相依性。
for (int i = 0; i <= dt - 4; i += 4) {
ymm3 = _mm256_set1_pd(i * delta);
ymm3 = _mm256_add_pd(ymm3, ymm2);
ymm3 = _mm256_mul_pd(ymm3, ymm3);
ymm3 = _mm256_add_pd(ymm0, ymm3);
ymm3 = _mm256_div_pd(ymm1, ymm3);
ymm4 = _mm256_add_pd(ymm4, ymm3);
}
可以看到 ymm3 有很強的相依性,而且看起來無法在縮得更小了。
嘗試使用更多的 AVX 暫存器來作 unroll looping 的優化,從原本的 ymm0~ymm4,增加到 ymm0~ymm14。但這種寫法的缺點就是程式碼遍得很龐大,而且不易閱讀。實驗結果在最下面。
OpenMP 版本
除了AVX SIMD 版本外,也使用 OpenMP 對的 for 迴圈作平行處理,而為了使編譯器能後成功的將順序執行轉為平行執行,運行系統必須確定循環的次數,因此 for 迴圈內不可以包含讓迴圈提前退出的關鍵字,例如 break、return、exit、goto,不過允許 continue 的存在。
以下是 openmp 語法,大概長這樣。詳情可參閱最後面的參考資料
#pragma omp <directive> [clause]
對於簡單的 for 迴圈的平行處理例子:
#pragma omp parallel for
for (int i = 0; i < 10; ++i)
test(i);
不過因為這個式子pi += dt / (1.0 + x * x);的存在,每次迭代都會讀取 pi 值並更新 pi 值,不同次的迴圈中並不相互獨立。因此不能簡單加上#pragma omp parallel for 就好,還要作些處理。
- 可以使用 atmoic、critical,防止變數同時被多個執行緒修改,但速度就會慢上許多,因為一次只允許一個執行續進行存取。
- 針對這種情境,可以使用 reduction。語法如下
reduction(<op>:<variable>)
支援的運算元有 +, , –, &, ^, |, &&, ||,它讓各個執行緒針對指定的變數擁有一份有起始值的複本(起始值是運算元而定,像 +, – 的話就是 0, 就是 1),平行化計算時,以各自複本做運算,等到最後再以指定的運算元,將各執行緒的複本合在一起。

#pragma omp parallel num_threads(omp_get_max_threads())
{
#pragma omp for private(x) reduction(+:pi)
for (size_t i = 0; i < N; i++) {
x = (double) i / N;
pi += dt / (1.0 + x * x);
}
return pi * 4.0;
}
結果與分析
-
注意
Makefile裡頭有-fopenmp -mavx,指定開啟 OpenMP 和 AVXCFLAGS = -O0 -std=gnu99 -Wall -fopenmp -mavx
-
取得原始程式碼並編譯:
$ git clone https://github.com/sysprog21/compute-pi
$ cd compute-pi
$ make check
- 使用 clock_gettime() 來測量不同實做的執行時間
- 需要等待,保持耐心!
$ make gencsv
之後可用 LibreOffice 建立圖表,如下所示:

時間處理與 time 函式使用
兩種不同的測量時間的函式,一個是 clock(),另一個則是 clock_gettime(),而在圖表上也呈現了兩種截然不同的結果。
進入實驗討論前,先了解一下時間觀念和如何使用 C 語言進行時間處理。畢竟要作 Performance Benchmarking,沒有正確使用 time 函式,可能就會導致錯誤的結果和結論。
撰寫時間量測程式前,先評估情況,問問自己幾個問題:
- 使用什麼 clock 測量?(Real, User, System, Wall-clock....?)
- clock 的精確度?(s, ms, µs, or faster ?)
- 需要多久時間你的 clock 會 wrap around?有什麼方法可以避免或處理?
- clock 是不是 monotonic (單調遞增)?還是會隨著系統時間改變 (NTP, time zone, daylight savings time, by the user...?)
- 使用的函式使否已經過時、或不是標準函式庫?
Wall-clock time vs. CPU time
通常我們在計算一個程序的 "Duration time",常常有可能是以下兩個意思,一個是「Wall-clock time」,另一個則是 「CPU time」,根據不同的情況和需求來選擇使用哪一個當作衡量標準。
1. Wall-clock time 顧名思義就是掛鐘時間,也就是現實世界中實際經過的時間,是由 kernel 裡的 xtime 來紀錄,系統每次啟動時會先從設備上的 RTC 上讀入 xtime。
struct timespec xtime __attribute__ ((aligned (16)));
struct timespec {
__kernel_time_t tv_sec; /* seconds */
long tv_nsec; /* nanoseconds */
};
這個值是自 1970-01-01 起經歷的秒數,另外 Linux 核心也會決定每秒要發生幾次中斷 (透過常數 HZ) ,每次 timer interrupt,就會去更新 xtime。
許多說明文件或問答網站常將 System time 和真實世界的 Wall-clock time 混用,System time 是指系統上的時間,開機時它會讀取 RTC 來設定,可能過程中還會有時區換算等之類的設置。一般說來 System time 就是我們執行 date 命令看到的時間,Linux 系統下所有的時間調用都是使用這個 (除非直接存取 RTC)。然後 Kernel 會有個全域變數 Jiffies 來紀錄系統開幾以來,經過多少個 tick。每發生一次 timer interrupt,jiffies 會加 1 ( xtime 和 jiffies 很相似,但其實完全不一樣,可參閱 容易混淆 LINUX 時鐘的 xtime 和 jiffies )。
另外注意,有時系統要與網絡中某個節點時間同步,那這個 Wall-clock time 可能會和 NTP 伺服器、時區、日光節約時間同步或使用者自己調整。所以「通常」不建議拿來量測程式時間,因為它不是一個穩定的時間,用專業一點的用語講,Wall-clock time 不一定是單調遞增 (monotonic)。
不過在這裡因為量測過程中沒有涉及到 NTP、時區改變之類的問題,Wall-clock time 是單調遞增,所以在電腦上所經過的 system time (elapsed time) 基本上會等於真實走過的時間。
2. CPU time 指的是程序在 CPU 上面運行消耗 (佔用) 的時間,clock() 就是很典型用來計算 CPU time 的時間函式,但要注意的是,如果有多條 threads,那 CPU time 算的是「每條 thread 的使用時間加總」,所以如果我們發現 CPU time 竟然比 Wall-clock time 還大!這可能是個很重要的原因。
另外很多時候只計算 CPU time 是不夠的,因為執行時間可能還包括 I/O time、 communication channel delay、synchronization overhead....等等。
- Real time , User CPU time , System CPU time ( Linux 的 time 指令 )
在今日的 UNIX 系統內事實上存在兩個 time 指令,一個是系統所提供的 /usr/bin/time,這個 time 指令是 System V 版本所提供的工具,這是為了 Bourne shell 使用者所寫的工具;而另一個則是 C shell 內建指令 time。
$ time 會報告實際時間,也就是程式從開始到結束的經歷時間,另外還會計算程式使用處理器時間量。
- real time : 也就是 Wall-clock time,當然若有其他程式同時在執行,必定會影響到。
- user time : 表示程式在 user mode 佔用所有的 CPU time 總和。
- sys time : 表示程式在 kernel mode 佔用所有的 CPU time 總和 ( 直接或間接的系統呼叫 )。
在單一處理器的情況下,可以使用 real - (user + sys) 來計算 Wall-clock time 與 CPU time 的差異。可以理解「所有」可以延遲程式的因子的總和。在 SMP 底下可以近似成 (real * 處理器數目) - (user + sys)。而這些因子可能是:
- 將文字或資料輸程式所需的 I/O ( 如 Network I/O, Disk I/O....)
- 取得實際記憶體供程式使用所需的 I/O
- 其他程式所使用的 CPU 的時間
- 作業系統所使用的 CPU 的時間
所謂 CPU bound,指的是程序需要大量的 CPU computation (對 CPU time 需求量大),相比之下僅需少量的 I/O operation,效能取決於 CPU 速度。
所謂 I/O bound,需要大量 I/O operation (I/O request 的頻率很高或一次 I/O request 成本很高),但僅需少量的 CPU computation,效能取決於 I/O device 速度。
很多時候我們可以使用 time 判斷程式是 CPU bound 還是 I/O bound。
real < user: 表示程式是 CPU bound,使用平行處理有得到好處,效能有提昇。real ≒ user: 表示程式是 CPU bound,即使使用平行處理,效能也沒有明顯提昇,常見的原因有可能是其實計算量沒有很大,生成、處理、結束多執行緒的 overhead 吃掉所有平行處理的好處,或是程式相依性太高,不適合拿來作平行處理。real > user: 表示程式是 I/O bound,成本大部分為 I/O操作,使得平行處理無法帶來顯著的效能提昇 ( 或沒有提昇)。
延伸思考:
- clock(), clock_gettime() 的使用
- time(), gettimeofday() 的使用
- 為什麼 clock_gettime() 結果飄忽不定?
- 為什麼 time() 和 gettimeofday() 不適合拿來作 benchmark ?
作業要求
- 在 GitHub 上 fork compute-pi,嘗試重現實驗,包含分析輸出
- 注意: 要增加圓周率計算過程中迭代的數量,否則時間太短就看不出差異
- 詳閱廖健富提供的詳盡分析,研究 error rate 的計算,以及為何思考我們該留意後者
- 用 phonebok 提到的 gnuplot 作為
$ make gencsv以外的輸出機制,預期執行$ make plot後,可透過 gnuplot 產生前述多種實做的效能分析比較圖表 - 可善用 rayatracing 提到的 OpenMP, software pipelining, 以及 loop unrolling 一類的技巧來加速程式運作
- 詳閱前方 "Wall-clock time vs. CPU time",思考如何精準計算時間
- 除了研究程式以外,請證明 Leibniz formula for π,並且找出其他計算圓周率的方法
- 請詳閱許元傑的共筆
- 將你的觀察、分析,以及各式效能改善過程,並善用 gnuplot 製圖,紀錄於「作業區」
參考資料
- Intel AVX Official Document
- How do I achieve the theoretical maximum of 4 FLOPs per cycle? [Stackoverflow]
- nanoant / flops , Mysticial / Flops [GitHub]
- MPI與OpenMP並行程序設計:C語言版 [PDF]
- Common Variable Attributes [gcc.gnu.org]
- 時間處理與 time 函式使用
- Measure time in Linux - getrusage vs clock_gettime vs clock vs gettimeofday? [Stackoverflow]
- Timer Interrupt [Openfoundry]
- Wall clock time [Whatis.com]
- Why real time can be lower than user time [stackexchange]
- Why is clock_gettime so erratic? [Stackoverflow]
- gettimeofday() should never be used to measure time
- 效能管理 [IBM Knowledge Center]
- linux 系統時間和硬件時鐘問題 ( date 和 hwclock )
- linux 牆上時間 xtime 與高精度時鐘 gettimeofday